
רקע
רשתות Inception v4 ו Xception הינן מהרשתות הטובות ביותר כיום בזיהוי מה רואים בתמונה.
ב 2014 גוגל ניצחה בתחרות ILSVRC עם רשת GoogLeNet שהראתה לקהילה ארכיטקטורה חדשנית בשם Inception לפיה שכבות לאו דווקא חייבות להיות בטור אלא במקביל ואת תוצאותיהן משרשרים. השיטה הזו חסכה בזיכרון והביאה לביצועים הטובים ביותר דאז. מאז יצאו גירסאות נוספות שנקראות inception v2, v3, v4 או Inception-Resnet שמשלבת את הרעיון הזה של גוגל עם רעיון המעקפים של מיקרוסופט של רשת Resnet.
כל רשתות CNN=Convolution Neural Network מכילות פעולות קונבולוציה. ב 2016 יצאה רשת Xception שחידשה את פעולת הקונבולוציה ע”י כך שהיקצינה את מודל ה Inception.
בקונבולוציה רגילה יש עיבוד (סכום מכפלות) של הקלט והגרעין (הפילטר) בכל המימדים ביחד (המרחביים והצבע\ערוצים channels). הרעיון מאחורי מודל ה Inception הוא לבצע את העיבוד הזה בנפרד הן על המימדים המרחביים (x,y) והן על מימד העומק (הצבע אם מדובר בתמונה הראשונית). יש הגיון בכך אם חושבים על כך שבתמונה המימד המרחבי שונה מהותית ממימד העומק שהינו הצבעים שבתמונה, ויש טעם בלבנות פילטרים בלתי תלויים שפועלים כל אחד בתורו.
הרשת Xception (extreme inception) מקצינה את הרעיון הזה באמצעות פעולה שנקראת depthwise separable convolution.
כותב המאמר Xception הינו François Chollet שגם ידוע כיוצר של Keras!
טכני
בקונבולוציה רגילה, בעבור טנזור בגודל 6x6x3 נצטרך kernel בגודל nxnx3. נניח n=2 אז קובית ה kernel בגודל 2x2x3 נעה בכיוון x,y בלבד על פני הקוביה הגדולה של ה 6x6x3 ובכל מעבר סוכמים את המכפלות. מימדי העומק של הטנזור ושל הגרעין שניהם שווים (לשלוש בדוגמא זו) ולכן הקוביה הקטנה לא נעה בכיוון z.
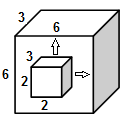
בקונבולוציה רגילה מימד העומק של הטנזור והגרעין זהים
בפעולת ה depthwise separable convolution לעומת זאת, יש שני שלבים, באחת הקוביה הקטנה נעה בכיוונים x,y ובשניה קוביה קטנה (אחרת) נעה בכיוון z.
ישנן גירסאות מימוש שונות, לפי המימוש המקובל (למשל ב Tensorflow) קודם מבצעים קונבולוציות מרחביות לכל ערוץ בנפרד (ז”א ה-kernel בגודל nxnx1) ואז מבצעים קונבולוציה למימד הערוץ ז”א מימד עומק (ה-kernel בגודל 1x1xc)
למשל, שורות הקוד הבאות מדגימות טנזור בגודל 6x6x3 שעובר separable conv עם פילטר מרחבי בגודל 3×3 ומכפיל את הערוצים פי 2 ועם פילטר “עומקי” שמגדיל 6 ערוצים ל 12 ערוצים:
depthwise_filter = tf.get_variable(‘depthwise_filter’, shape=[3, 3, 3, 2])
pointwise_filter = tf.get_variable(‘pointwise_filter’, shape=[1, 1, 6, 12])
y = tf.nn.separable_conv2d(x,depthwise_filter, pointwise_filter, strides=[1, 1, 1, 1], padding=‘SAME’)
והתוצאה הינה טנזור בגודל:
(? מייצג את גודל ה batch)
ארכיטקטורת Xception כפי במוצגת במאמר כוללת שלושה מרכיבים: middle, entry, exit הכוללים בעיקר פעולות Seperable Conv, ReLu, MaxPooling:
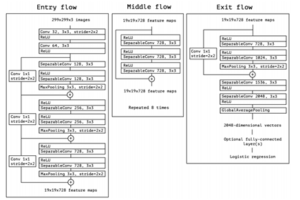
תודה ל Xception
תוצאות
באותו מאמר הם מציגים ביצועים על מאגר ImageNet (מאגר של עשרות מיליוני תמונות עם אלף מחלקות).
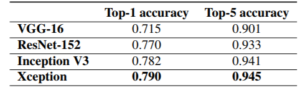
תודה ל xception
ותוצאות על FastEval14K (מאגר של 14,000 תמונות עם 6,000 מחלקות) כאשר הרשת אומנה על JFT (מאגר פנימי של גוגל של 350 מיליון תמונות עם 17,000 מחלקות):
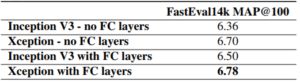
תודה ל xception
כמו כן הרשת MobileNet (רשת קלה וקומפקטית שרצה על מובייל) מבוססת על Xception.
קישורים
מימוש Xception ב Tensorflow:
https://github.com/kwotsin/TensorFlow-Xception
מימוש Xception ב Keras:
https://github.com/keras-team/keras/blob/master/keras/applications/xception.py


